
НАЗНАЧЕНИЕ
Приводы антенные АДФМ.464345.001.00, АДФМ.464345.002.00 и АДФМ.464345.003.00 предназначены для применения в системах слежения, наведения и управления положением антенных устройств широкого спектра назначения.
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
| Параметр | Модель 464345.001 | Модель 464345.002 | Модель 464345.003 |
|---|---|---|---|
| Масса управляемых антенных устройств, кг (не более) | 200 | 100 | 50 |
| Площадь управляемых антенных устройств, м 2 (не более) | 8.5 | 3.5 | 1.2 |
| Максимальный крутящий момент, Нм (не менее) | 2000 | 2000 | 500 |
| Статический тормозной момент, Нм (не менее) | 4000 | 4000 | 1000 |
Число управляемых осей – 2;
Диапазон поворота привода по азимуту ± 180°;
Диапазон поворота привода по углу места – от 0 до +90°
Точность сопровождения объекта (не хуже):
– при скорости ветра до 25 м/с – 5′
– при отсутствии ветра – 1-3′
Скорость вращения привода:
– в режиме наблюдения, минимальная – 15″/сек;
– в режиме возврата, максимальная – 1000″/сек
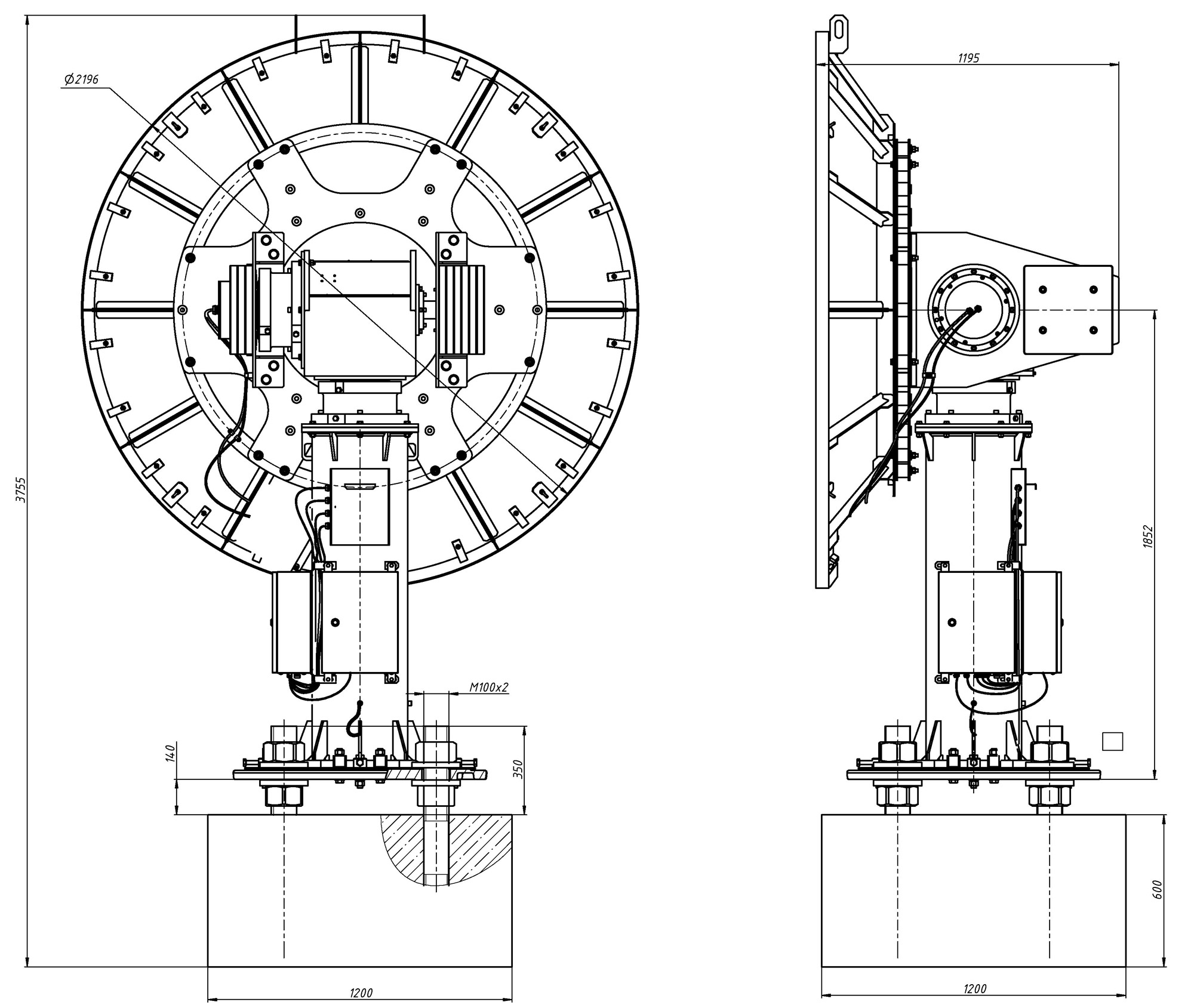
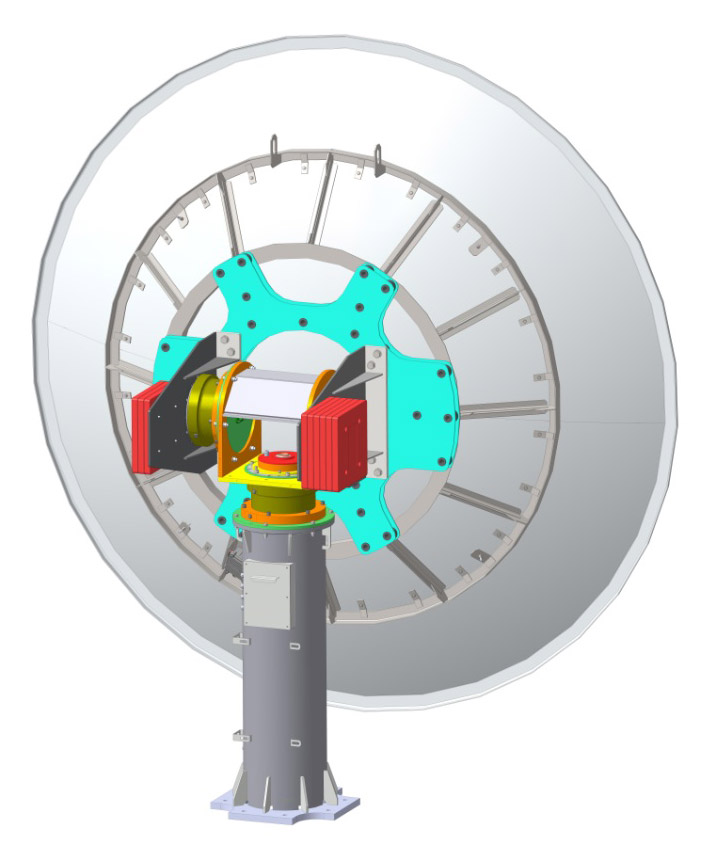
ОБЩИЙ ВИД ПОВОРОТНОГО ПОСТА
СОСТАВ
Приводы антенные имеют одинаковый функциональный состав:
– электропривод;
– шкаф управления;
– устройство юстировочное;
– блок распределения питания.
УСТРОЙСТВО И РАБОТА
Электроприводы обеспечивают вращение с заданной точностью в диапазоне углов и со скоростью, указанной в основных технических характеристиках. Вращение обеспечивают два мехатронных модуля, по одному на каждую ось.
В каждый мехатронный модуль входят:
- полно оборотный датчик абсолютного положения;
- точный редуктор;
- понижающий редуктор;
- вентильный двигатель со встроенным контроллером управления двигателем.
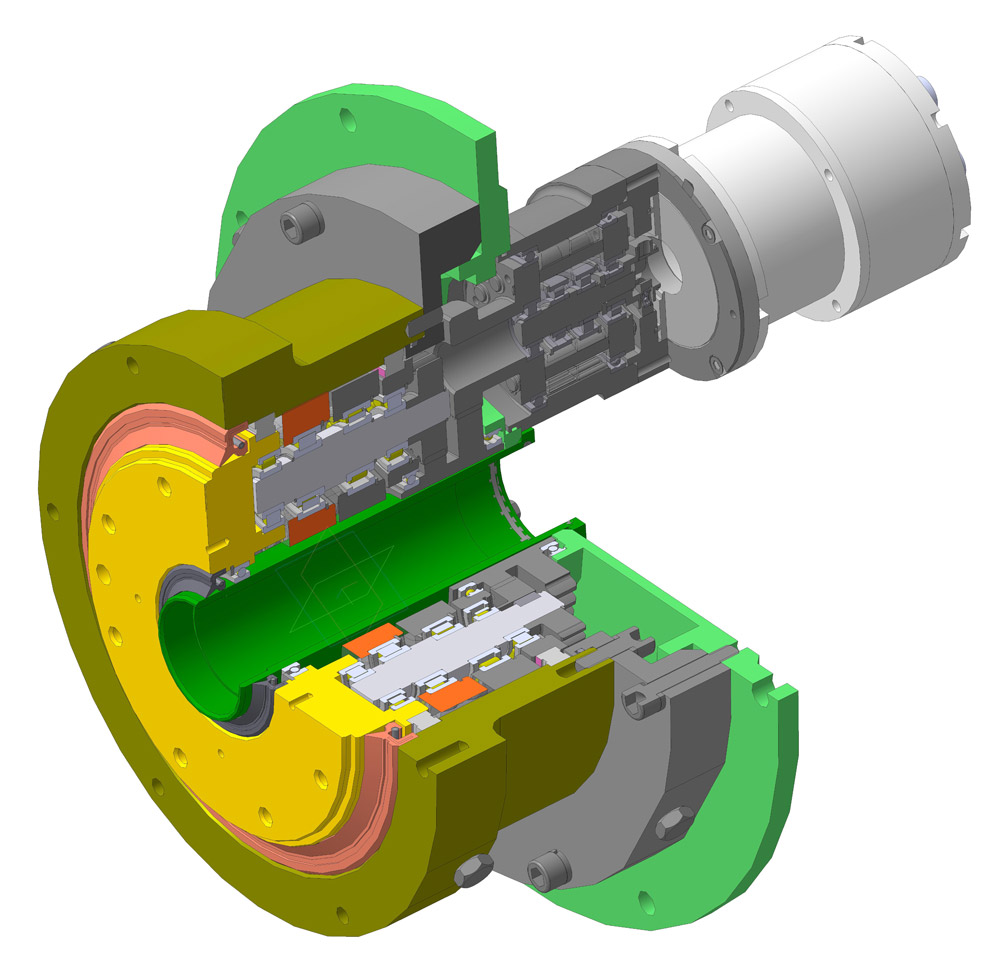
Два планетарно-цевочных редуктора в составе мехатронного модуля
Блок управления из состава шкафа управления управляет контроллером вентильного двигателя посредством протокола RS-485 Modbus.
Режим наблюдения реализован следующим образом. Блок управления получает пакеты данных из центра управления, рассчитывает траекторию и управляет контроллером вентильного двигателя. В обратном направлении блок управления отправляет данные телеметрии, текущее состояние и коды ошибок. Скорость вращения привода в режиме наблюдения, не постоянная, подчиняется закону движения.
КАЧЕСТВО

РЕАЛИЗАЦИЯ
